4.3. Spatial trend filtering#
4.3.1. Introduction#
Consider a surface data \(Y\in\mathbb{R}^{m\times n}\) over the grid \(\{1, \cdots, m\}\times\{1, \cdots, n\}\). We want to approximate \(Y\) with a piece-wise linear surface \(X\) as follows:
Note that the matrix \(X\) itself is dense, and the sparsity is imposed on its second order difference of horizontal and verticalsuccessive elements \(x_{i, j-1}-2x_{i,j}+x_{i, j+1}\) and \(x_{i-1, j}-2x_{i,j}+x_{i+1, j}\). To utilize the capacity of sparse optimization of skscope, we need to reparametrize \(X\) with a sparse matrix \(\Theta\).
We introduce another manner to characterizing the piece-wise linear surface \(X\). Consider the following four neighbourhood elements \begin{align*} &x_{i-1, j-1} &x_{i-1, j}\\ &x_{i, j-1} &x_{i, j} \end{align*} and they locate on the same plane if and only if \(x_{i,j}=x_{i-1, j}+x_{i, j-1}-x_{i-1, j-1}\). On the contrary, if there is a jump at the position \((i, j)\), it holds that \(x_{i,j}=x_{i-1, j}+x_{i, j-1}-x_{i-1, j-1}+\theta_{i,j}\) with \(\theta_{i,j}\neq 0\). Thus, we can iteratively represent the dense matrix \(X=(x_{i,j})\) with a sparse matrix \(\Theta=(\theta_{i,j})\). The first row and the first column is represented as
For other elements, we have for \(i\geq 2, j\geq 2\) that
4.3.2. Implementation#
Denote \(p=m\times n\), we vectorize the matrices \(X\), \(\Theta\in\mathbb{R}^{m\times n}\) as \(p\)-dimensional vectors \(\mathrm{Vec}(\Theta)\) and \(\mathrm{Vec}(X)\in\mathbb{R}^p\) in a row-wise manner. The following function get_c computes the coefficients \(c_{st}, 1\leq s\leq i, 1\leq t\leq j\) and the function gen_matrix computes the coefficient matrix \(C\) statisfying
[1]:
import numpy as np
import jax.numpy as jnp
import matplotlib.pyplot as plt
from skscope import ScopeSolver
[2]:
m, n = 40, 40
p = m * n
def get_c(i, j, s, t):
if (s > i) or (t > j):
return 0
elif (s==0) and (t==0):
return 1
elif (s==i) and (t==j):
return 1
else:
return i - s + j - t
# the (k, l) element C(k, l) of the matrix C is gen_matrix(k, l)
def gen_matrix(k, l):
i = k // n
j = k % n
s = l // n
t = l % n
return get_c(i, j, s, t)
C = np.zeros((p, p))
for k in range(p):
for l in range(p):
C[k, l] = gen_matrix(k, l)
Then, the spatial trend filtering [1] can be formulated as follows
where \(Y\in\mathbb{R}^{m\times n}\) is a given matrix data, \(C=(c_{st})\in\mathbb{R}^{p\times p}\) is a known coefficient matrix constructed as above, \(\theta\in\mathbb{R}^p\) is the optimized variable and sparsity is a user-defined sparsity parameter.
The following function stf implements the above spatial trend filtering algorithm.
[3]:
def stf(Y, sparsity):
m, n = Y.shape
p = m * n
y = Y.reshape(-1)
def custom_objective(params):
return jnp.mean(jnp.square(y - C @ params))
solver = ScopeSolver(p, sparsity)
params = solver.solve(custom_objective)
Theta_hat = (C @ params).reshape(m, n)
return Theta_hat
4.3.3. Synthetic data example#
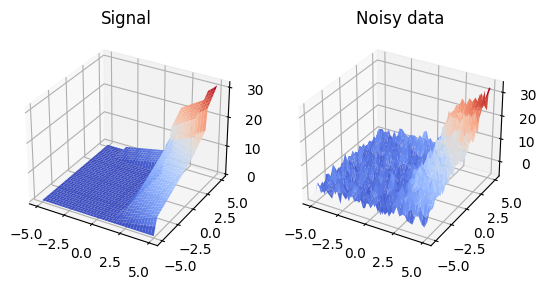
In the following, we generate a piece-wise linear surface \(X\) with the above parameterization such that \(\mathrm{Vec}(X) = C \mathrm{Vec}(\Theta)\) where \(\mathrm{Vec}(\Theta)\) is a \(5\)-sparse vector with all nonzero elements being \(0.2\).
Then, the data \(Y\) is obatined by adding Gaussian noise to \(X\) satisfying \(y_{ij}=x_{ij}+2\mathcal{N}(0, 1), 1\leq i\leq m, 1\leq j\leq n\).
The following figure shows that our parameterization actually has the ability to represent a piece-wise linear surface with a sparse vector.
[4]:
xx1 = np.linspace(-5, 5, m)
xx2 = np.linspace(-5, 5, n)
X1, X2 = np.meshgrid(xx2, xx2)
theta = np.zeros(p)
pos = np.random.choice(np.arange(p), 5, replace=False)
theta[pos] = 0.2 # np.random.rand(len(pos)) * 5
X = (C @ theta).reshape(m, n)
rng = np.random.default_rng(12345)
noise = rng.standard_normal((m, n)) * 2
Y = X + noise
fig = plt.figure(figsize=(10, 5))
ax1 = fig.add_subplot(131, projection='3d')
ax1.plot_surface(X1, X2, X, cmap='coolwarm')
ax1.set_title('Signal')
ax2 = fig.add_subplot(132, projection='3d')
ax2.plot_surface(X1, X2, Y, cmap='coolwarm')
ax2.set_title('Noisy data')
plt.show()
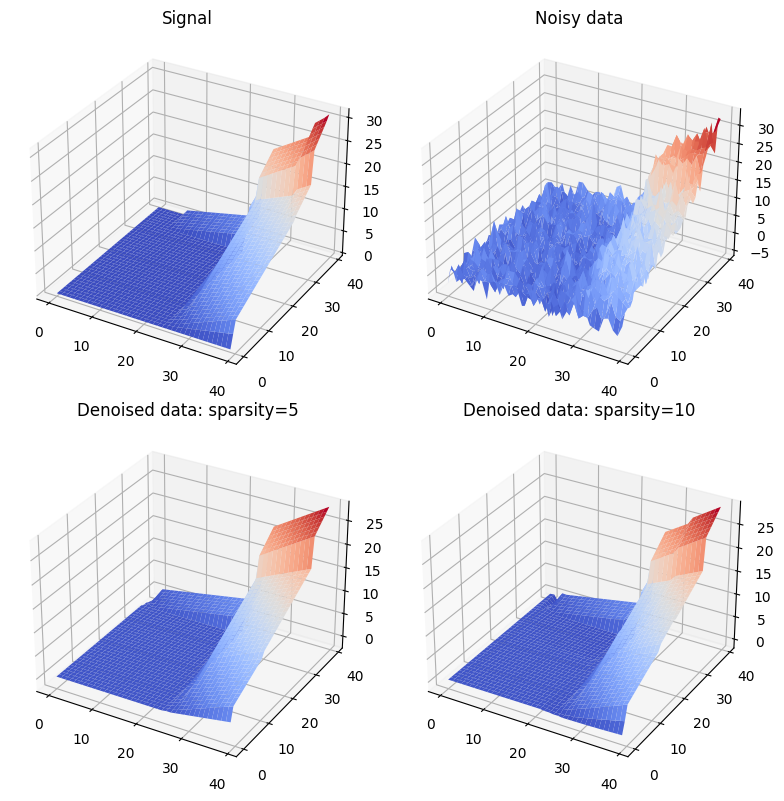
We estimate the true piecewise linear surface \(X\) with two sparsity levels \(5\) and \(10\) and obtain two corresponding estimators X_hat1 and X_hat2.
[5]:
sparsity1, sparsity2 = 5, 10
X_hat1 = stf(Y, sparsity1)
X_hat2 = stf(Y, sparsity2)
The quality of these two estimators is visualized in the following figure.
Both estimators filter the noisy data \(Y\) and approximate the true piecewise linear surface \(X\) well.
[6]:
fig = plt.figure(figsize=(8, 8))
xx1 = np.arange(m)
xx2 = np.arange(n)
X1, X2 = np.meshgrid(xx2, xx2)
ax1 = fig.add_subplot(221, projection='3d')
ax1.plot_surface(X1, X2, X, cmap='coolwarm')
ax1.set_title('Signal')
ax2 = fig.add_subplot(222, projection='3d')
ax2.plot_surface(X1, X2, Y, cmap='coolwarm')
ax2.set_title('Noisy data')
ax3 = fig.add_subplot(223, projection='3d')
ax3.plot_surface(X1, X2, X_hat1, cmap='coolwarm')
ax3.set_title('Denoised data: sparsity={}'.format(sparsity1))
ax4 = fig.add_subplot(224, projection='3d')
ax4.plot_surface(X1, X2, X_hat2, cmap='coolwarm')
ax4.set_title('Denoised data: sparsity={}'.format(sparsity2))
plt.tight_layout()
plt.show()
4.3.3.1. Reference#
[1] Kim S J, Koh K, Boyd S, et al. \(\ell_1\) trend filtering[J]. SIAM review, 2009, 51(2): 339-360.